Malý zelený maskot Android si svojim príjemným vzhľadom nachádza obdiv stále u väčšej skupine ľudí, určite sa na tomto zhodneme s našimi čitateľmi. Pripravili sme si pre vás zaujímavý návod, ako si vytvoriť vlastného Android robota. Tanabata je mechanizovaný Android panáčik, ktorý pohybuje hlavou na ktorej ma blikajúce oči, reaguje na zvuk a môže vysielať správy v morzeovej abecede.
Malý zelený maskot Android si svojim príjemným vzhľadom nachádza obdiv stále u väčšej skupine ľudí, určite sa na tomto zhodneme s našimi čitateľmi. Pripravili sme si pre vás zaujímavý návod, ako si vytvoriť vlastného Android robota. Tanabata je mechanizovaný Android panáčik, ktorý pohybuje hlavou na ktorej ma blikajúce oči, reaguje na zvuk a môže vysielať správy v morzeovej abecede.
Podľa vzoru zo stránky www.pcworld.com si teraz predstavíme podrobne spôsob zapojenia a princíp fungovania.
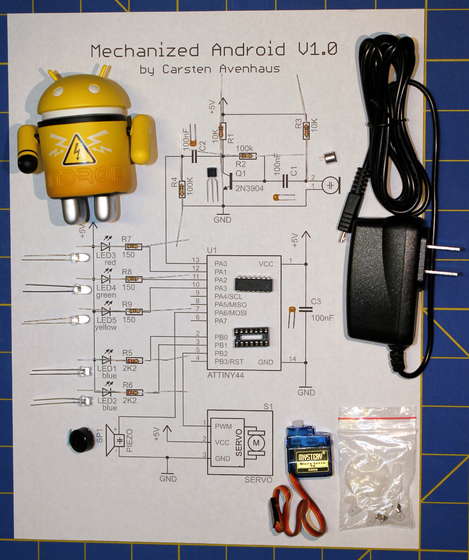
Krok 1: Diely a Schémy
Zoznam Súčiastok:
1 x Android postavička z DYZPLASTIC
1 x ATtiny44A z Mouser alebo Digikey
1 x 14 pin DIL pätice
1 x Micro Servo SG90 (plast) alebo MG90S (kov)
1 x Mikrofón napr CMC-5042PF-AC z Digikey
1 x Piezo (pasívne, nie bzučiak)
2 x 5 mm modrý plochý vrchol širokouhlý LED
1 x červená super jasné LED 5 mm
1 x zelená super jasné LED 5 mm
1 x žltá super jasný 5mm LED
1 x NPN tranzistor 2N3904
3 x keramický kondenzátor 100NF
2 x 100K odpor
2 x 10K odpor
2 x 2K2 odpor (alebo iné hodnoty v závislosti na vašom modrými LED diódami)
3 x 150 odpor
1 x +5 V napájania (napr. USB nabíjačka)
Existuje mnoho rôznych verzií postavičiek Android. Lenže ak chcete mať LED diódy vo vnútri tela, je asi najlepšie zvoliť svetlý Android. Tmavšie tie by mohli zablokovať svetlo, ktoré presvecuje cez obal.
Na oči by som odporučil super jasný širokouhlý plochý vrchol 5mm LED. Treba k nemu použiť trocha väčší odpor a upraviť podľa toho hodnoty. Môžete skúsiť aj iné hodnoty, aby bol maximálny jas je podľa vašich predstáv.
Použil som SD90 Mystery servo s plastovými prevodmi . No po 2 mesiacoch intenzívneho používania som ho musel vymeniť s T-Pro MG90S, ktorá má kovové prevody. Je viac hlučný, ale dúfaj, že bude kvalitnejší.
5 V USB nabíjačka pre mobilný telefón robí pekný napájania.
Ak chcete program ATtiny44A mikroprocesora môžete buď použiť oficiálny Atmel program ako AVRISP MKI alebo jeden z mnohých tretej strany programátorov.
Krok 2: Zapojenia
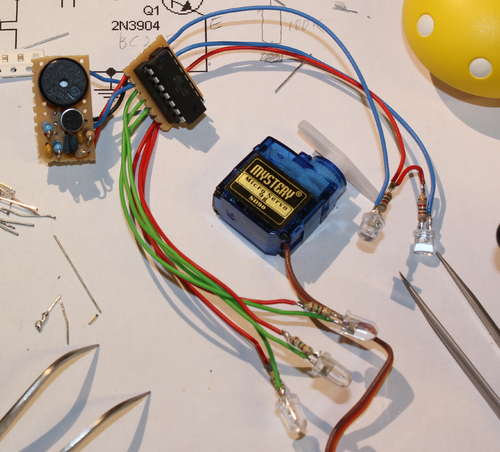
Je dobré dať MCU a mikrofóny zosilňovač na dve samostatné dosky. Toto uľahčí jeho guľaté telo. Je možné pridať 6 pin. programovaciu hlavičku k doske MCU. Ale znova, kvôli priestorovým dôvodov je lepšie robiť samostatný programovací adaptér.Snažte sa udržať všetko, čo najmenšie. Prispájkovať rezistory priamo na LED diódy.
Krok 3: Otvorenie Android panáčika

Odstránenie hlavy od tela, môže byť celkom ťažké, vyžaduje si to značnú silu. Pozrite sa na obrázok s demontovanou hlavou.

Lem v prednej a zadnej časti hlavy je sploštený. Pracujete račej odzadu panáčika, takže akékoľvek škody od otvorenia nebudete vidieť spredu. Tiež dajte pozor, aby ste tiež omylom nerozbili antény počas procesu otvárania.
Krok 3: Úprava tela

Ďalším krokom bude úprava hlavičky a to z dôvodu toho aby dokázal s nou ľahšie točiť. Podľa obrázka musíme odrezať väčšinu hlavy až po okraj. Lenže hlava musí aj nejako držať, tak si na ľavej aj pravej strane necháme časť z ráfiku.


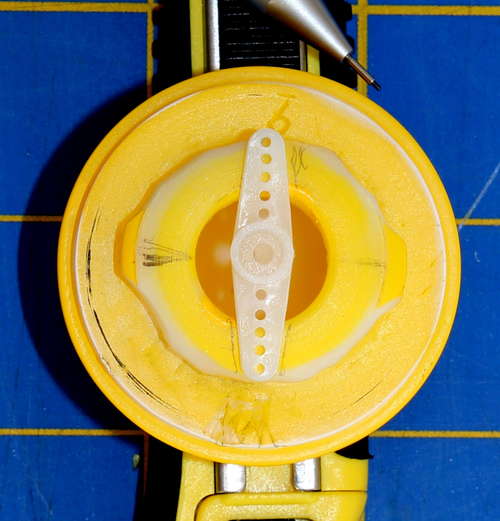
Krok 5: Pripojenie pohonu ku krytu

Ďalším krokom je umiestniť plast ktorý bude otáčať hlavu android panáčika. Označte výrezy ceruzkou a pokúste sa to udržať všetko v strede ak je to možné. Potom podľa obrázka vyrežte aj prednú aj zadnú časť hlavy.
Krok 6 Inštalácia pohonu
Odrežte malé kúsky na strane motorčeku, ktoré sa obvykle používajú, aby udržal na mieste. Namiesto toho použite lepidlo na spodnej časti panáčika Android. Uistite sa, že motorček dosahuje dosť ďaleko, až k dosiahnutiu drážky v hlave. Keď to nie je úplne fit na prvýkrát nezúfajte. Lepidlo je možné odstrániť pomerne čisto a môžete sa pokúsiť znova. SG90S je mierne vyššia ako SD90 a zapadá o niečo lepšie.


Krok 7: Inštalácia elektroniky
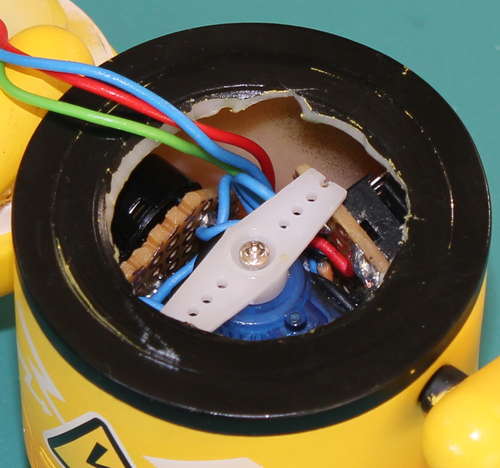

Zatlačte elektroniku na strane motorčeka. Uistite sa, že hlava motorčeka môže voľne otáčať. Tri LED diódy idú na prednú časť tela a sú prilepené. To isté platí pre dve LED diódy ktoré sú umiestené v očiach. Uistite sa, že vodiče sú zastrčené tam kde majú byť. Napájanie vyveďte do jednej z nôh. Pre lepšiu stabilitu odrežte USB konektor a použiť tenší, pružnejší drôt.Možno budete musieť vŕtať niekoľko malých otvorov, kde sa nachádza mikrofón a piezo.
Krok 8: Software

Tento softvér je napísaný v assembleri. LED diódy sú ovládané piatimi 100 Hz prerušeniami riadenými softvérom PWM. LED jas nie je vnímaný lineárne. Vyhľadávací tabuľka to pomáha kompenzovať .
Pohon je riadený 50 PWM software Hz. Pohony od rôznych výrobcov sa mierne líšia PWM šírka impulzu min / max hodnota. Je dôležité dbať na presnú úpravu. V opačnom prípade môže dôjsť k poškodeniu motorčeka. Piezo vyžaduje frekvenciu v rozsahu kHz. Hardware AVR PWM sa používa ho riadiť.
Jeden z kanálov ADC sa používa na čítanie výstupu z mikrofónneho zosilňovača. Ak sa dosiahne určitého prahu, je spustený. Rôzne mikrofóny majú vplyv na výkone zosilňovača. Spúšťaciu úroveň možno nastaviť v softvéri. Citlivosť je nastavená tak, že ignoruje normálnu konverzácie, ale spustí sa až, keď sa napríklad buchne po mikrofóne :-)
Jeden z ôsmich Morseových druhov abecedy sa hrá v náhodnom poradí. Morseova abeceda je zakódovaná v tabuľke, ktorú prekladá ASCII znakmi, na zodpovedajúcimi Morseovými signálmi pritom používa dvoj bitové kódovanie.
Zdrojový kód môže byť zostavený a naprogramované zadarmo v AVR Studiu IDE. Tiež existujú open source alternatívy
Krok 9: Koniec
Dúfam že sa vám návod na zostrojenie vlastného Android robota páčil. Budeme radi ak si zostrojíte aj vy nejakého podobného a dáte nám vedieť, určite to uverejnime a v prípade kvalitného spracovania môžete očakávať aj nejakú vecnú cenu. Samozrejme existuje množstvo spôsobov ako vylepšiť zeleného robota a je to len na vašej šikovnosti.